无人机-从远古的飞翔梦想到现代的空天使者
时间: 2023-11-07 05:53:02 | 作者: 光学镜片|安博官网地址
- 产品介绍
无人机经历了悠久的发展历史正快速走进我们的日常生活中。本文回顾了无人机的发展历史,介绍了无人机的主要应用领域,讨论了当前无人机研究的热点。
飞行是人类古老的梦想,在2500年前的古代希腊与中国,先贤们就慢慢的开始研究怎么样翱翔在蔚蓝的天空[1]。第一个能自动在天空飞行的机器据称来自意大利的塔伦特姆的一个叫Archytas的人。传说他是一个具有奇思妙想的工匠,设计了很多的机械。在公元前405年,他设计了一个机械鸟并给它命名为“鸽子(pigeon)”,其构造大致如图1所示。

图1艺术家记载的飞行的机械“鸽子”,据记载是第一个飞行器,也是第一个无人飞行器,据记载它能飞200米远
差不多在同一时代,在世界的另一端,中国人首创性的提出了垂直起飞的概念。最古老的竹蜻蜓的构思是将羽毛绑在一根棍子的末端,将棍子在双手之间旋转产生足够的升力,然后释放,竹蜻蜓就可以飞行了。在古代的中国,我们富有想象力的祖先们尝试了多种类型的飞行器,例如热气球,火箭或者是风筝。这些飞行器一部分用于娱乐,也有很多被用于军事。在公元前450年前一种木鹰就被设计出来用于侦查敌人。
很多世纪之后的1483年,达芬奇,这位通晓很多领域的全才,设计出了一种名叫空中螺丝或者空中陀螺的可以在空中悬停的机械。该飞机的直径有5m,其设计结构是使用足够的力使得轴旋转,以此来实现旋转和飞行,如图2所示。一些专家觉得这台机器是直升机的始祖[2]。

达芬奇还在1508年设计了一只机器鸟,当它沿着一根缆线下滑时,可以通过双曲柄机构扇动翅膀。第一次被广泛认可的载人飞行发生在1783年,它是采用蒙哥尔兄弟设计的热气球来实现的,如图3所示。不久以后,英格兰也有了类似的尝试,并且持续几年都以气球为主实现载人飞行,直到19世纪60年代才出现了第一架直升机和后来的固定翼飞机。

1860-1909年间,很多种飞行器被设计出来,因为当时使用的引擎仅以蒸汽为动力,这些飞行器以垂直起降飞机为主。随着发动机功率/重量比的提高,这些早期的机器成为今天仍在使用的直升机和飞机的设计雏形。
推动飞机发展的主要动力一直都是快速安全地运送人员和货物。但另一方面,军方也很早就认识到无人机的潜在价值,并开始努力让飞行器适应没有驾驶员的飞行。这种最初的无人驾驶输送系统,现在被称为导弹或智能炸弹。这种系统还可作为“靶机”协助防空炮操作员的训练。今天,无人机系统被定义设计为执行每次任务后会被收回的系统,虽然它可能装备有武器,但武器本身并不是机体的组成部分。
1916年,在莱特兄弟的历史性飞行之后不到15年,第一架现代无人机就诞生了,这就是休伊特-斯佩里自动飞机,由设计这架无人机的两位设计者的名字命名。假如没有斯佩里对陀螺仪设备的前期工作,这架无人机就不可能变成实物,因为它需要陀螺仪设备来保持飞行稳定性(以后的很多飞行器都借鉴了这一方法)。斯佩里设法吸引美国海军的兴趣,使柯蒂斯-斯佩里空投鱼雷得到发展。在同一时间,美国陆军航空队赞助了查尔斯.凯特灵研发自由鹰空投鱼雷,如图4所示。由于技术问题和缺乏精准度,军方对自动飞机失去了兴趣,但很快使用远程操作机进行打靶训练的潜力被发现了。

图4美国空军“自由鹰”空投鱼雷,也称为“凯特灵臭虫”,以其发明者查尔斯.凯特灵的名字命名
在英国,20世纪20年代的无人驾驶飞机实验采用RAE1921型无人靶机进行。1933年,皇家海军首次使用蜂后靶机。这时德哈维兰公司(De Havilland)制造的虎蛾双翼飞机的改良版已成功应用于重炮检验。
遥控操作需要完善无线电控制,这一观念由特斯拉(Tesla)于1895年提出,并于1898年得以实现。1934年,当演员雷吉纳德.丹尼(Reginald Denny)开始经营他的“雷吉纳德.丹尼兴趣店”并销售无线电控制的飞机时,私人用无人机工业得到了加快速度进行发展。几年后,他向美国军方展示了他的成果,促使第二次世界大战期间非常成功的靶机用无人机得到了广泛应用。
二战结束以后,世界并没有恢复宁静。冷战时期的敌对双方对侦查任务的兴趣剧增。SD-1,雷吉纳德.丹尼的靶机后裔,成为第一架侦查无人机的原型[3],它也被称为是MQM-57“猎鹰者”。它的研制时间是20世纪50年代中期。在其停产之前,总共制造了近1500架。如图5所示,SD-1是遥操作型飞机,携带一架摄像机,并能在飞行30分钟后返回基地用降落伞回收。

图5 SD-1,也称为MQM-57“猎鹰者”,是美国陆军的第一架侦察无人机,并一直服役至20世纪70年代
U-2高空侦察机时而不时被击落带给美军的压力成为了无人侦察机发展的新动力。美国空军支持瑞安147(Ryan 147)型无人机发展成一系列多用途机型,如图6所示。在20世纪六七十年代,这些机型还基于遥控飞机的设计,用于执行美国对中国、越南等国的侦察任务。在此期间,共发射了3500架“萤火虫”无人机,其中近84%成功返回[4]。瑞安147型,即“萤火虫”无人机,可能是第一架符合当今的UA定义的无人机。实际上到目前为止,这种无人机的现代版本仍在生产并执行任务。越战中,美军无人机主要配合载人侦察机执行侦察和目标指引任务,任务区域大部分是载人侦察机不宜前往的区域。越战结束后,美国空军因经费缩减而进行组织重整,他们都以为无人机的应用场景范围局限,对作战的影响力也有限,因此无人机部队就此解散[5]。

图6 AQM-34Q,瑞安147型无人侦察机的变体之一,使用于20世纪六七十年代
将无人机应用于别的方面的尝试也在不断进行。例如美国海军从Gyrodine公司购买的无人驾驶直升机,即QH-50 DASH[6]。还有超高声速、远程侦察无人机的设计等等。这些研究在当时虽不是很成功,但为以后扩展无人机的应用埋下伏笔。
在冷战时期真正大幅扩展了无人机应用的是以色列人。与美国竭力追求无人系统的高升限、高速度等性能不同,以色列在无人机开发和使用领域也有着非常丰富的经验和实践,然而他们事实上走出了无人机开发应用的另一条路[7]。据称,以色列之所以更早地意识到无人系统重要性,并投入大量精力和资源进行开发,其原因主要在于1973年“赎罪日战争”中以空军有人战机在现代防空体系前的惨重损失。后来以色列飞机工业公司(Israeli Aircraft Industries)和塔迪兰公司(Tadiran)分别研制了自己的飞机,分别是“侦察兵(Scout)”和“驯犬(Mastiff)”。

以色列显然更注重将其低性能的无人机视作战场实时情报的来源,使用思想上的差异使以军在运用无人机方面取得更显著的效果。1982年黎巴嫩战争期间,以军对各类战术无人机创造性的使用(首次在危险的战场上,使陆军获得了一种廉价的实时情报获取手段;在贝卡谷地之战中无人机被用来引诱叙利亚雷达,侦查叙利亚SAM系统,实时回传战场态势[7]),激发了很多国家军队对无人机的热情,这其中也包括无论是从规模及时间上都优于以色列使用无人机的美国[8]。
经过冷战以后,无人机的发展进入了新的时代。无人机以其经济、安全、方便的应用特点使得它不仅在军事上得到大范围的应用,在民用方面也逐渐得到多个领域的持续关注。当前无人机慢慢的变成了执行“枯糙、恶劣、危险和纵深(Dull, Dirty,Dangerous and Deep, 4D)”任务的首选:
“恶劣”是指任务环境可能被化学、生物、放射性物质甚至核污染,使人体不能暴露于其中;
“枯燥”是指重复性的任务或者持久性任务,在此类任务中,飞行员易产生疲劳和紧张。
在见证了以色列对无人机花样百出的应用之后,美军作为学生开始重新审视无人机在作战中可发挥的作用,并将无人机的应用发扬光大。20世纪90年代以来,美英等国在海湾战争、科索沃战争中普遍的使用各型无人机。1991年海湾战争投入200架无人机,6个“先锋”无人机连参战,执行522架次飞行任务,飞行时间1638小时。1999年科索沃战争投入“捕食者”、“猎人”、“先锋”等7型300多架无人机,执行战场监视、电子对抗、战场评估、目标定位、气象探测和散发传单等任务。美国911事件爆发后,2001年10月18日,美空军首次使用RQ-1“捕食者”无人攻击机发射2枚“海尔法”(地狱火)空对地导弹,对头目奥马尔的家人车队进行了攻击,开创了无人机对地攻击的先河。
当前,美军已发展了一套覆盖从小到大,从低空到高空,从航时几十分钟到几十个小时的无人机谱系[10][11]。如图8所示:

小到重仅几克的侦查无人机,如图9所示为电影《天空之眼》中的甲虫;大到能够持续飞行几千公里在多种通信链路的支持下可完成战略侦察任务的高空长航时无人机全球鹰,如图10。单兵的陆军手抛式无人机可以被应用于陆军作战小组的战术情报侦查,弹射型陆军战术无人机可以支持陆军战役级别的情报侦查,衍生自捕食者的中空长航时察打一体无人机MQ-9现今慢慢的变成了悬在美国人定义的“”头上的利剑,如图11所示。


图10全球鹰无人机是一种高空、长航时无人机。这是世界首款跨太平洋飞行的无人机

图11MQ-9“死神”无人机是“捕食者”无人机系统的更新版本。它大多数都用在持久猎杀关键的时敏目标,其次是用于情报搜集。
当前美军在持续推进他们的无人机研究计划。如无人作战飞机系统X-47B,美军2013年在航空母舰上完成了它的起降试验[12]。它的很多设计都超越了现有的无人机的能力,未来可能替代有人作战飞机成为美国海军的撒手锏。美空军还在研制能够支持集群作业的小型无人机Perdix。它能够较好支撑根据任务进行集群自主飞行的想定,现在已经进化到了第7代,平均半年进化一代[13]。

无人机在军事领域中的成功应用,激发了民用领域对无人机应用探索的热情[1][13]。无人机已被美国政府应用于很多的工作中,例如边境侦察,灾难反应等[14]。由于无人机有很优越的续航能力,可拿来执行边境巡逻等任务:它们能够实时传回视频、图像以及合成孔径雷达信息以给地面执行任务单位以支持。
基于无人机执行任务中所反映出来的优势,它们也可被应用于处置应急行动,例如灾难反应。图13展示了无人机在灾难反应中的各种应用。

图13无人机在灾难反应中[13].图a中一个长航时的无人机能够给大家提供对灾难的场景感知,构建地面的通信网;图b中能够悬停的旋翼无人机可以检测材料的裂纹和气体泄漏;图c中的旋翼无人机可以将附近的药品运输到现场;图d中的扑翼无人机能完成集群式飞行,它们能够进入建筑中搜寻化学危害源;图e多模态笼式无人机可以飞入或者滚入复杂的结构中去探索生命体征或者检验器材的安全性。
在2010财年至2013财年之间,美国空海行动处(Air and Marine Operations, AMO)组织无人机进行了约450小时的飞行以进行洪水抢险、搜索救援等应急反应[14]。
其他较广泛的应用无人机的领域包括科学研究,测绘,农业实用等。日本自二十多年前就开始将无人驾驶直升机应用于农业(主要是用于农药喷洒)。到2002年,雅马哈(老牌无人机制造厂商)RAX模型机的使用数量就超过了2000架,这一个数字在逐年增加。目前已经有超过12000名操作员获准操作无人驾驶直升飞机,且在农业应用中无人直升机的数量已经超越了普通载人直升机[1]。我国对农业无人机的应用也逐渐兴起并得到了政府的全力支持[15]。

无人机在民用领域发展最为迅猛的是旋翼无人机。相比与固定翼无人机,旋翼无人机技术门槛较低,拥有非常良好的飞行可控性以及较低廉的价格,为生产厂商将无人机推广到寻常百姓家提供了一种实现途径。私人使用旋翼无人机的主要应用是航拍。借助于无人机,普通人找到了观察世界的另一个视角,如图15所示。

由于无人机所具有的特点,很多领域尝试应用无人机解决领域相关的具体问题,例如应用无人机投送快递,电力巡检,以及进行表演等等。
随着技术的发展,无人机的谱系被不断拓宽。固定翼式无人机与旋翼式无人机虽然能力强大,但在很多场景中存在局限性。很多场景中要使用到小型或微型无人机。尺寸减小会导致旋翼无人机升力效率降低,以此来降低飞机的飞行效率。对于固定翼无人机,较小的尺寸决定了雷诺数(为了表征流体流动情况的无量纲数)的减小。这在某种程度上预示着固定翼飞机在飞行时会产生更大的空气阻力,获得更小的升力。为了获得足够的升力,必须增大飞机的相对飞行速度,这导致了飞行效率的下降。
以对小型和微型无人机的需求为牵引,扑翼无人机的应用研究慢慢的变成为热点[16]。扑翼式无人机的优点是它借鉴仿生学原理获得在空中飞行的动力,其飞行效率较高。但对扑翼式无人机的研究难点是其动力学模型过于复杂,将飞鸟或者飞虫的运动方式建模为方程是极其困难的。即便如此,当前已经有很多科学家提出了不同的扑翼式无人机,如图16所示。伴随着材料科学与控制科学等相关学科的发展,未来扑翼式无人机必将得到更大的发展,更广阔的应用。
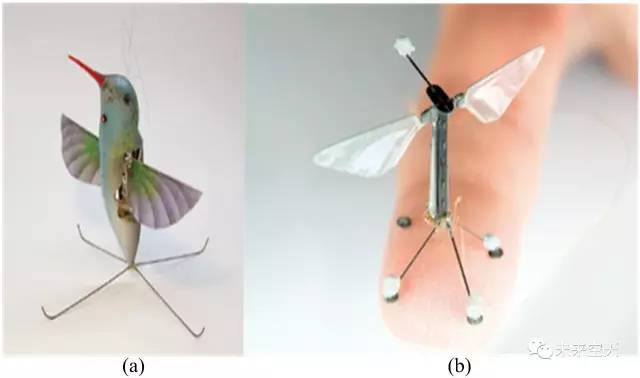
图16扑翼式无人机[13]。(a). Nano蜂鸟无人机,重19g。(b). RoboBee无人机,重89毫克,能够在外置电源条件下飞行[13]。
另一个对无人机的热点研究是无人机的集群化使用。随着无人机应用的逐渐拓宽,人们逐渐意识到让一群价格较低廉、性能较低的无人机执行任务会比让单架性能好但价格昂贵的无人机执行任务有更高的可靠性,且能够降低耗费。因此无人机集群化使用成为民用和军用领域研究的热点。通过观察动物界的集群现象,Reynolds总结集群的三个基本规律:相互接近的飞鸟之间有斥力,相互远离的飞鸟之间有吸引力,以及每个飞鸟的飞行保持与自己周围飞鸟的平均速度相同[17]。基于这一定义可以在仿真环境中很容易的模拟集群行为。但在真实环境中,一定要考虑无人机相互之间感知状态信息的机制。基于已有的技术,在户内的真实实验中,可应用基于红外的感知设备(例如VICON系统)感知无人机的运动状态。在户外的实验中主要依赖无线电通信传输无人机GPS信息实现无人机间的相互感知[18],也有学者研究使用视觉传感器感知无人机之间的相互距离[19]。在难以通过视觉获得可用信息的条件下,有人研究利用声音信号来测定无人机之间的相对位置信息[20]。

图17无人机集群化使用。公司组织的无人机集群灯光秀。(b).军事应用中设计的无人机集群作战场景
让无人机集群安全、协调的飞行只是应用无人机集群的基础。进一步需要仔细考虑无人机集群在任务层的相互协调。无人机集群的特点是冗余设计,集群的总体能力之和需要大于达成目标的需求。但是无人机集群是分布式系统,需采用复杂的协调方法确保无人机集群能够合作式的分配任务。大致上可以将集群的管理模式分为两种不同的思路。第一种思路是集中式管理的架构。宾西法尼亚大学由Vijay Kumar教授带领的团队自2010年左右展开无人机集群有关技术研究[21]。他们对无人机集群进行研究的目标是探索未来军事活动中小型平台和传感器组成的大型网络在动态、资源有限、敌对环境中执行任务时的关键技术问题。他们在无人机集群飞行相关的多个层次上取得了较为瞩目的研究成果:包括快速、稳定的规划和路径跟踪算法[22-23];多四旋翼无人机的编队操控方法[24];在平台具备稳定飞行和快速跟踪能力的基础上他们进一步提出了集群系统二层分组控制的框架结构。在集群的层面下将无人机分为多个组(group),同组无人机可以有效的进行高速通畅的数据交互。为了确认和保证组内无人机实现较高精度的控制与构型,每组无人机的数量有限。组与组之间的协调对通信带宽的需求较小。在解决集群任务分配管理问题时他们提出同组无人机默契配合完成需紧密耦合的单个子任务,不同组的无人机通过协调完成一个任务松耦合的各个子任务。

当前Vijay Kumar等人正在研究由自主机器人和移动式传感器组成的可扩展集群。他们盼望构建一个能体现动物界集群行为的集群框架,破解集群在陌生场景中的应用难题。
另一种思路是采用分布式方法。在机器人集群方面的研究对无人机集群也有较大的启发意义。哈佛大学的研究人员于2014年在《科学》期刊上发表文章,阐述了他们在大规模集群方面的研究工作[25]。在他们的研究中,大量小型机器人在获得大致构型信息和种子机器人参照信息的条件下进行自主构型。每个小型机器人在运动的过程中只能得到自己周边的机器人的位置信息。在规则和监督下的集群智能涌现现象首次在真实物理环境下得到验证和体现。通过大量机器人运动的验证发现,虽然集群最终得到的构型大致相同,但集群中机器人在每次任务执行过程中的行为都存在很大的随机性和不确定性。从集群智能的角度分析这体现了数量较多的智能体协调合作时带来的智能涌现行为。但从控制的角度分析这是在分布式环境下机器人由于近视性(myopic)造成的大量随机反应性行为。由于机器人没有办法获得全局信息,也无法规划出一个集中优化解,只可以通过近视的随机反应来达到集群集体的目标。每一个机器人的反应性控制都带有尝试性,因此大量智能体完成构型的过程难以预测。

以上两个典型的与集群相关的研究的目标都是探索集群控制和应用中的问题。宾夕法尼亚大学的Vijay Kumar带领的团队从个体出发,在保证每个个体有充足可信的能力的前提下逐步扩大四旋翼无人机的规模。当集群规模进一步增大后采用分层次的操控方法。他们采用的是自底向顶逐渐递进的思路,力求集群中的所有个体都能够高效、快速的相应和完成控制中心的任务。哈佛大学的研究中个体虽然能轻松的获得邻居位置和全局构型等信息,但每个机器人在如何达到目标,采用何种行动上存在比较大的自由度。他们研究大规模集群的思路是每个机器人在能力有限的前提下通过自行寻找、尝试来搜索可以在一定程度上完成集群目标的解决方案。因此集群执行任务的过程中存在效率低和不确定性大的特点。这两种研究理念各自代表了一部分研究人员的观点。Kumar等人预见随着四旋翼的数量继续增加,集中式操控方法会遇到新的问题,分布式的管理和控制方法或将成为必须[23]。无人机间需要采用更多分布式协调的方法。哈佛大学应用的大量机器人构型的方法虽然低效,但却为由较多无人机或机器人构成的集群的控制和规划方法的研究提供了有意义的参考。
因此,可以归纳得到较一般的结论:随着集群系统规模增大,集群系统内部各个元素的受控制水平将会逐渐降低,同时集群内各个元素的自协作水平将逐渐提高。基于这一思路,可以将多无人机组成的集群的协调过程看成一个分布式部分可观马尔科夫决策过程(decentralize multi-robot partially observable Markov decision processes, POMDPs)[27].进一步采用博弈方法、拍卖算法等协调算法解决集群内部对任务的合作式分派问题[28]。
本文对无人机的发展历史进行了介绍,对当前无人机在军用和民用领域的主要应用模式进行了阐述。进一步本文探讨了无人机在未来发展和应用的一些前沿性热点方向并对一些核心问题进行了分析。
[1] 谢海斌,尹栋,杨健,程巧.无人机融入国家空域系统. 国防工业出版社.2015.10.
[15] 港媒:农用无人机在中国“起飞” 市场潜力巨大. 参考消息网.
上一篇:无人机的开展前史及在电视新闻中的运用现状 下一篇:国际上第一架无人机是哪一年制作的







